The following steps show you how to create and build Z-Wave - NCP Serial API Controller firmware for Z-Wave 800 ZGM230SA SoC.
Before you do anything, please make sure the secure firmware on your ZGM230SA is update to latest one. When I write this article, I use GSDK 4.4.1/Z-Wave SDK 7.20.2 and the latest secure firmware version for ZGM230SA is 2.2.4 for your reference.
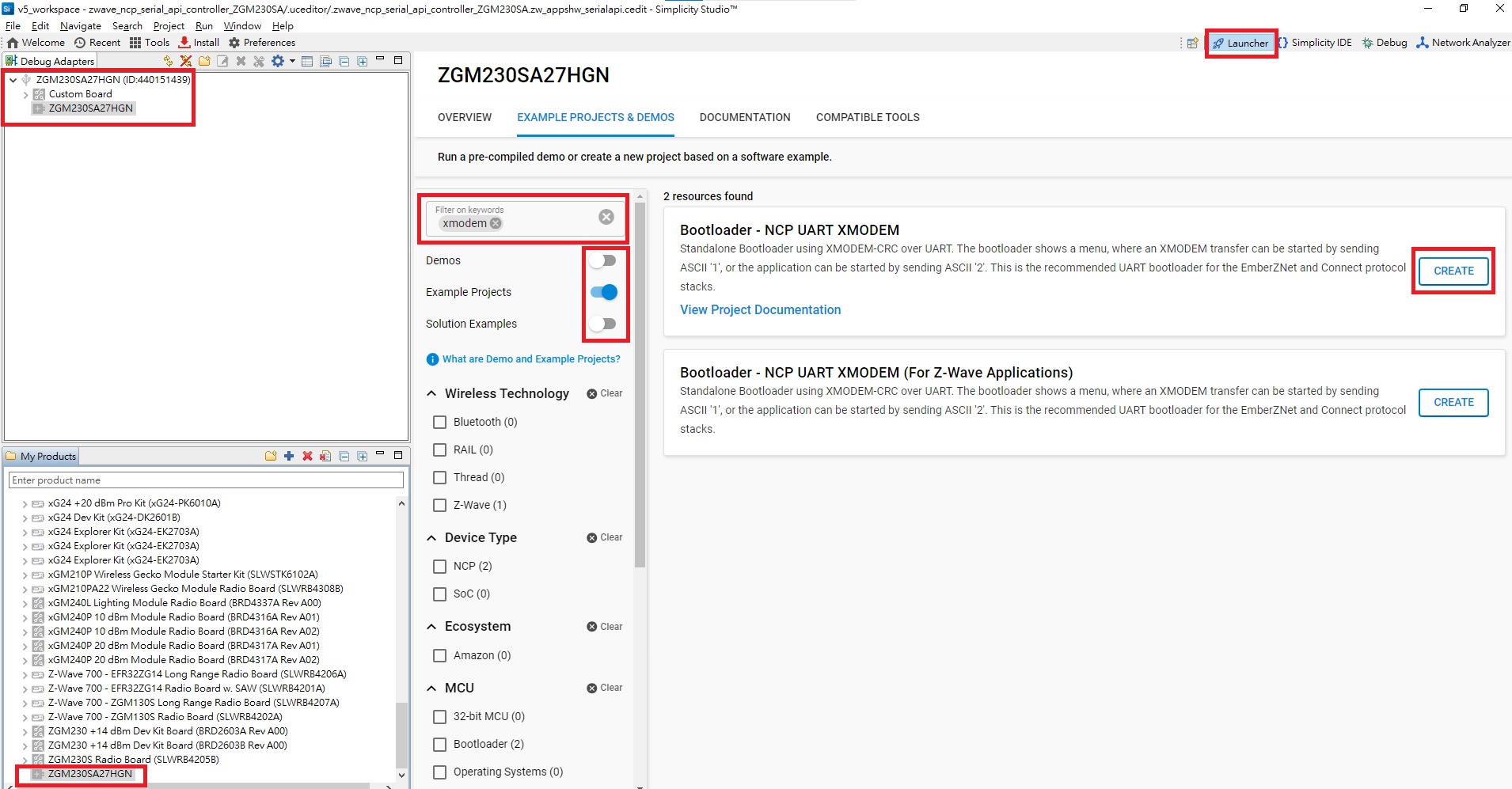
To have Z-Wave - NCP Serial API Controller firmware working, you need to create and build Bootloader - NCP UART XMODEM first.The follow steps show you the details to create and build it.
1. Start Simplicity Studio v5 and go to Launcher perspective with your custom ZGM230SA borad connected or selecting ZGM230SAin "My Products" perspective. Create Bootloader - NCP UART XMODEM project as the following screenshot.
2. Go to "Bootloader UART Driver" and "GPIO activation" software component to configure UART TX/RX and SL_BTL_BUTTON pins according to your ZGM230SA custom board schematics.
3. Build and download Bootloader - NCP UART XMODEM firmware to your ZGM230SA custom board.
Then, you can create and build Z-Wave - NCP Serial API Controller firmware for your custom ZGM230SA board using the following steps:
1. Create Z-Wave - NCP Serial API Controller project as the following screenshot.
2. Go to "SerialAPI AppsHw" software component
to configure UART TX/RX pins according to your ZGM230SA
custom board schematics.
3. Build and download Z-Wave - NCP Serial API Controller firmware to your ZGM230SA custom board.
After download both "Bootloader - NCP UART XMODEM" and "Z-Wave - NCP Serial API Controller firmware" firmware to your ZGM230S custom board, you can connect it with serial-to-USB convertor to your desktop and run Z-Wave PC controller to test it.